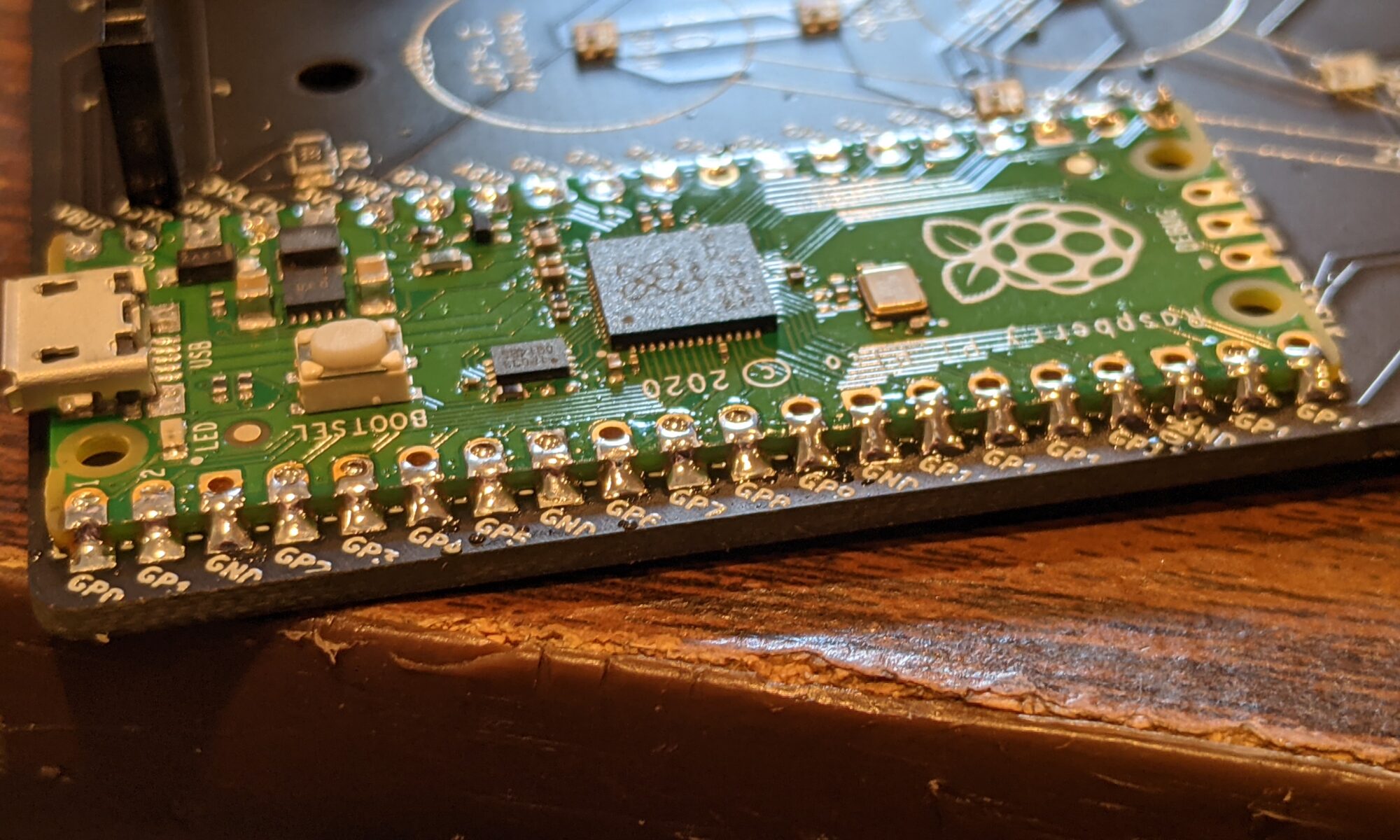
When we chose our badge design, we were cocky and full of ourselves, and went with surface-mount pads on our prototypes. Because our badge is based on the RPi Pico microcontroller, and had castellated edges, we figured we would minimize soldering, maximize space for silkscreen artwork, and up the cool factor by mounting on the pads using solder paste with the castellated edges.
Well, that turned out to be too hard. We don’t know what we’re doing, and didn’t have time for a learning curve, and kept running into bridging below the surface, which is hard to correct after it’s soldered down.
So we decided to go back to thru-hole with the finals. We soldered about half of them with thru-hole headers, which, let me tell you, is a pain. 40 header pins soldered to the board, and 40 soldered to the Pico. It’s tried and true, and any screw-ups are obvious and visible, but we were disappointed.
I was assembling the last of batch 1 earlier today, and decided on a whim to try headerless soldering directly to the pads with regular solder instead of paste. I used a 20-pin header temporarily on the left side to hold the pico in place on the board, soldered down the right side, then removed the header and soldered down the left. It worked great. It’s the best of both worlds. It saves wasted time with headers, cuts soldering in half, and keeps unsightly pins from poking out the bottom of the board. Just like regular thru-hole soldering, problems are visible. Bridging is not usually a problem, the solder tends to stick to the pads on the board as well as the generous copper pads on the Pico. All I need to do is make sure there’s a nice ramp from the upper pad, waterfalling over the castellated edges and onto the board pad.
If you ever have the urge to base a PCB around the Pico, consider this option.
Yes, we’re aware you can get the RP2040 chip on its own without the Pico, but one of our members bought a whole REEL of Picos, so it made sense for us to do this.
We added guided breathing to our badge. Whether you use it to control your heart rate, raise your kundalini or simply de-stress, that’s up to you. But the badge now includes three levels of guided Vagus breathing. Just follow along with the pretty lights, sync yourself up, and get ready.
I first learned how profoundly breathing can affect the mind and body when I encountered a book in the 80s called Taoist Yoga: Alchemy and Immortality. It’s the kind of thing that has pretty much instant results, and makes you want to come back for more.
I was recently reminded when reading Recapture the Rapture: Rethinking God, Sex and Death in a World that’s Losts its Mind by Jamie Wheal.
I thought I’d bring this to the badgelife folks for consideration and feedback, so we included it in our badge for this year.
And no, the Vegas/Vagus puns are not lost on us at all.
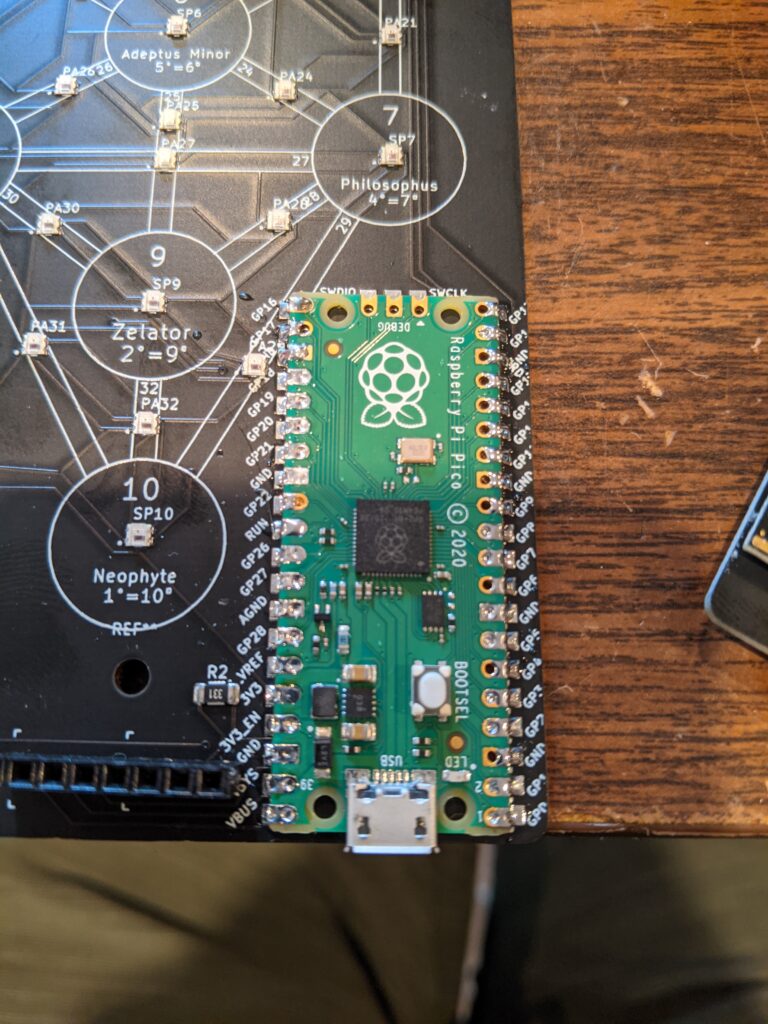
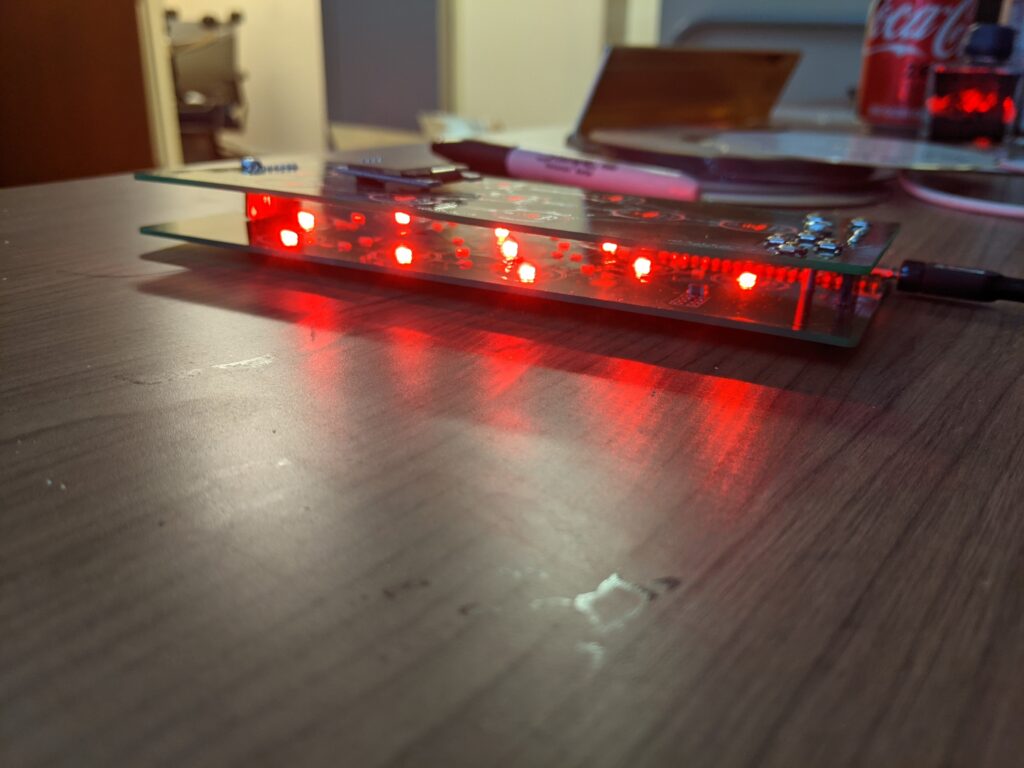
I just realized we’ve been so focused on getting them out on the Twitterverse that we haven’t posted an updated view of the final badges here.
With the green prototypes, we found we couldn’t flow most colors through the substrate perfectly, because all of the “cool” colors were too close to the green solder mask, and basically made large green clouds behind the board. Nice effect, but we wanted more flexibility.
We thought it would work better with black, allowing us to take advantage of the RGBs on the second board, but we weren’t expecting it to look THIS good. Kevin’s working hard on visual effects, and the challenge games, and implementing a Vagus breathing exercise (what happens in vagus stays in vagus) assistant to help you de-stress during and after the con. I don’t think that’s been done on an indie badge before, LOL. There’ll be a separate article on that later. Or you could just google it.
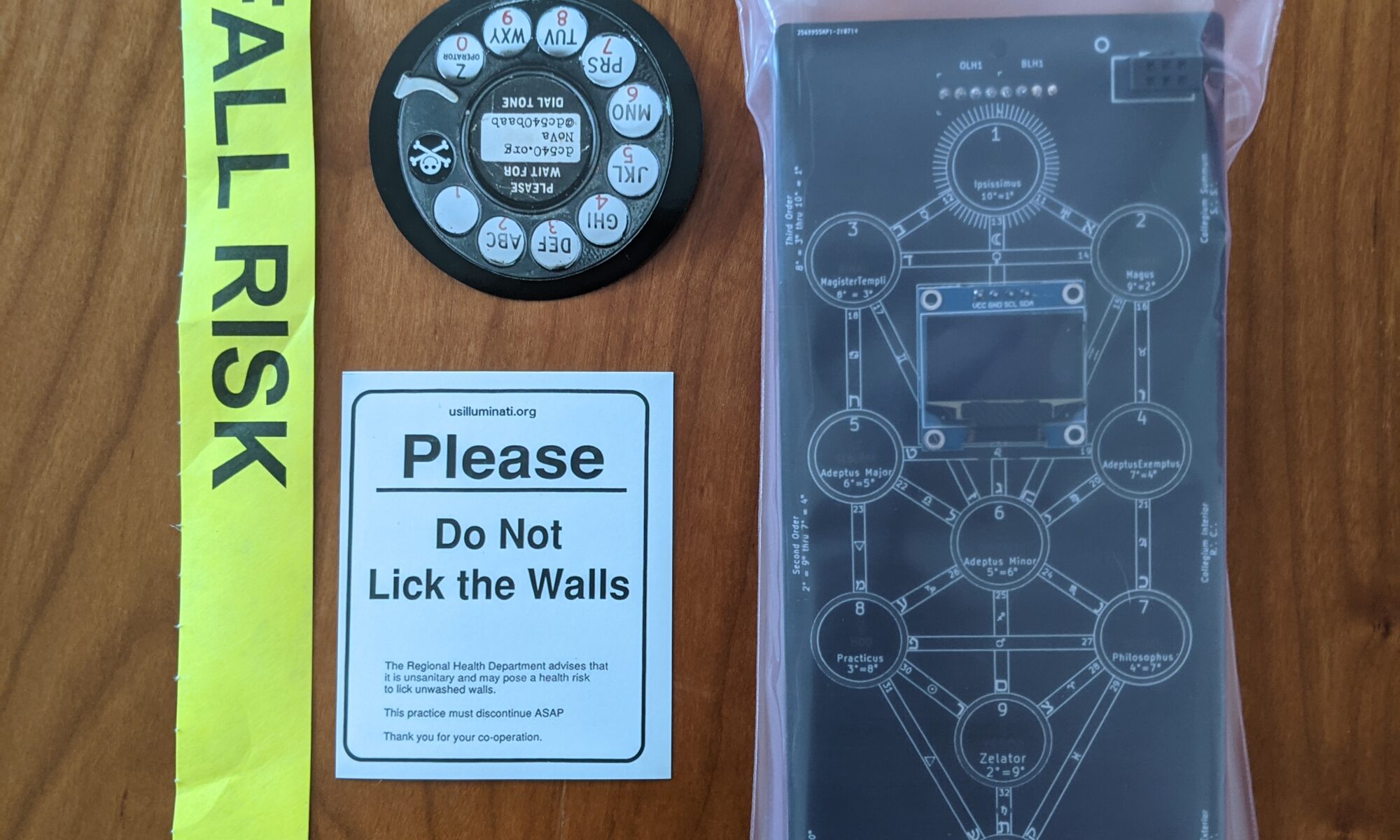
The badge will come with a custom lanyard and a little bit of swag. Hopefully we’ll find time to add an instruction manual. We’ve got the anti-static bags, the shipping boxes, and all the swag. We’re just waiting for the lanyards and the final firmware. We will definitely have some at the con*, but we’ll have more ready to ship within a couple weeks after the con, unless miracles happen and heaven and earth and international shipping bend to our will. Stranger things have happened. Stay tuned. Follow us on twitter @dc540_nova for the latest updates. Join the Discord if you want to hang out with us. We’re usually online Monday evenings, although this Monday we’ll be a bit distracted soldering a bunch of stuff.
[*Assuming the con still happens. From this viewpoint, it appears things are heating up in the west. My plan is to go if I can, i.e., if the con isn’t cancelled, if travel isn’t disrupted, and if restrictions don’t make it impossible. If plans get disrupted, ours or yours, everyone who ordered badges for hand delivery can have them shipped, we’ll figure it out.]
Also, Kevin created a stellar hype video to get your blood pumping (before we slow it down again with the Vagus breathing exercises).
I was made aware of this book very recently on Twitter in one of the many, many threads calling out shitty behavior, specifically shitty behavior at cons, more specifically shitty behavior at Defcon.
As a person who runs a space and attends cons, it seemed exponentially important for me to read it.
I’ve been around a while. I’ve seen shitty behavior. I’ve seen shitty behavior at Defcon. Combine people who have never had their bad behavior challenged with the Vegas factor and the perception of anonymity, and it’s easy to see how things can go off the rails really quickly.
Going into this book, I felt like I had done the work. I’ve worked on myself over the years. I’ve intervened and confronted on behalf of others. I’ve been that person that discreetly notifies staff that a problem might be brewing. After reading this book, I know there’s even more to do. I was surprised. In fact, I was surprised at how surprised I was.
Shawna (Twitter: @ShawnaPotterWOW) does a fantastic job at describing the problems faced by marginalized people — people of color, women, LGBTQIA+, etc. — and then takes it farther by giving real world examples of both shitty behavior and legit strategies that can be employed by community space staff, allies and even bystanders. None of it is extreme or difficult. In fact, 99% of it costs nothing, and much of it aims for not only de-escalation of a situation and how to support the victim in the moment, but also changing the behavior using confrontation, education and specifically targeted strategies on dealing with the person who has been harmed as well as the person causing the harm.
I feel like this book is a great starting point for anyone who manages a group or opens up a space to the public. I still have questions, of course, but as the book points out, these behaviors and their reactions can be nuanced and require thinking outside of the box, and there will be situations that come up that feel like gray areas. But the book does a fine job of guiding the reader into the mindset of a victim-centered approach.
The important thing is that it makes situations that may seem unmanageable seem more manageable by providing you with a toolset for dealing with them.
Going forward, there’ll be a copy in the DC540 library. Members who are interested are encouraged to consider reading it. Or get your own copy:
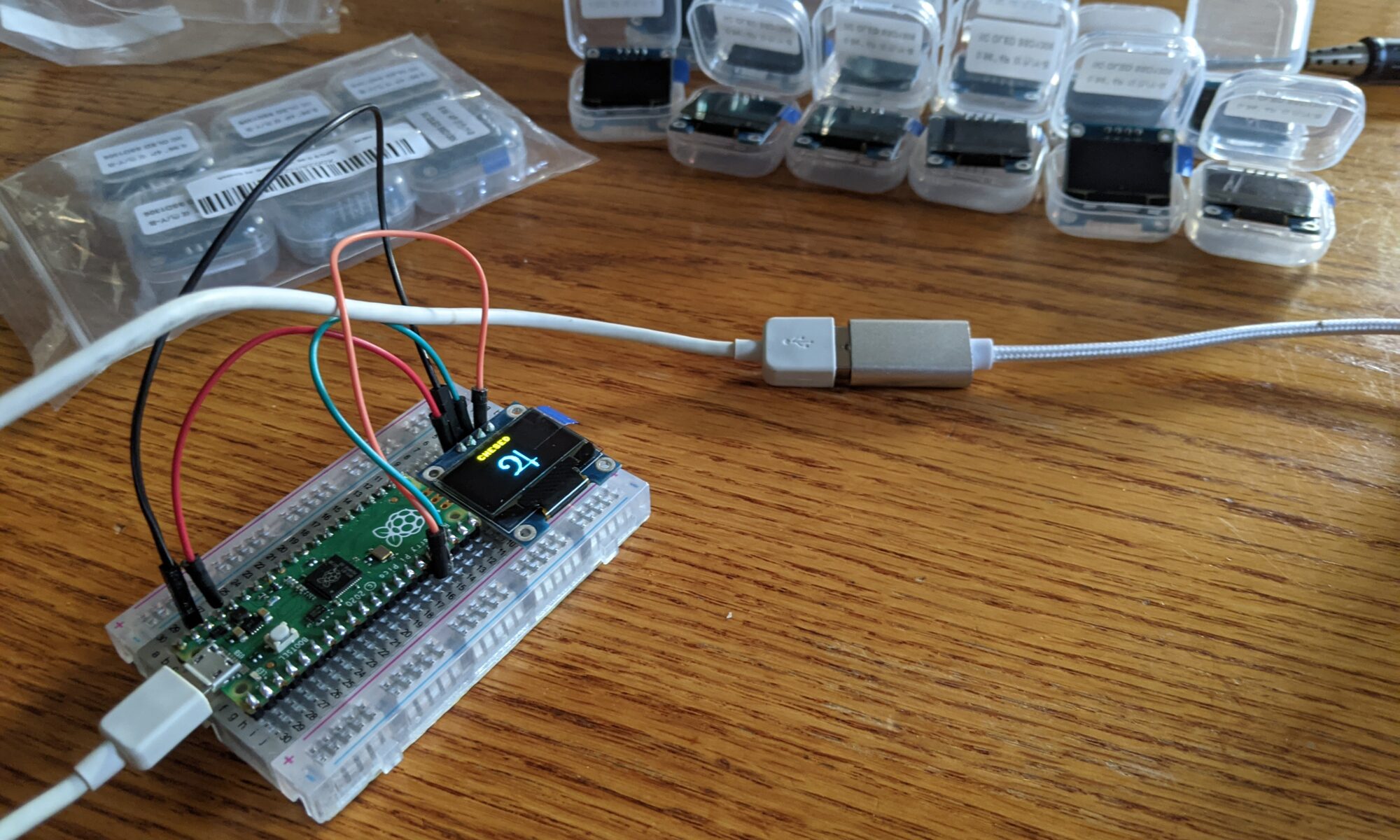
Better to find out you have a faulty OLED before it’s soldered to a PCB, right?
All of ours passed testing. These are the things you fill your time with to ease anxiety while waiting for the boards to show up from across the sea.
Ordering ESD bags. Designing custom lanyards. Making sure you have enough header connectors. Testing components. Ordering battery holders or LIPOs. Figuring out battery logistics. Can you take the batteries you chose on the plane?
Packing materials. Did you know you can get free flat-rate shipping boxes from USPS?
Stickers. It’s always cool to throw some stickers in there for good measure.
So this year DC540 decided to go through the exercise of creating a badge for Def Con 29. None of us had ever done this before. The most any of us had done was design a very simple minibadge with just one LED and one resistor. But a bunch of us are #badgelife addicts.
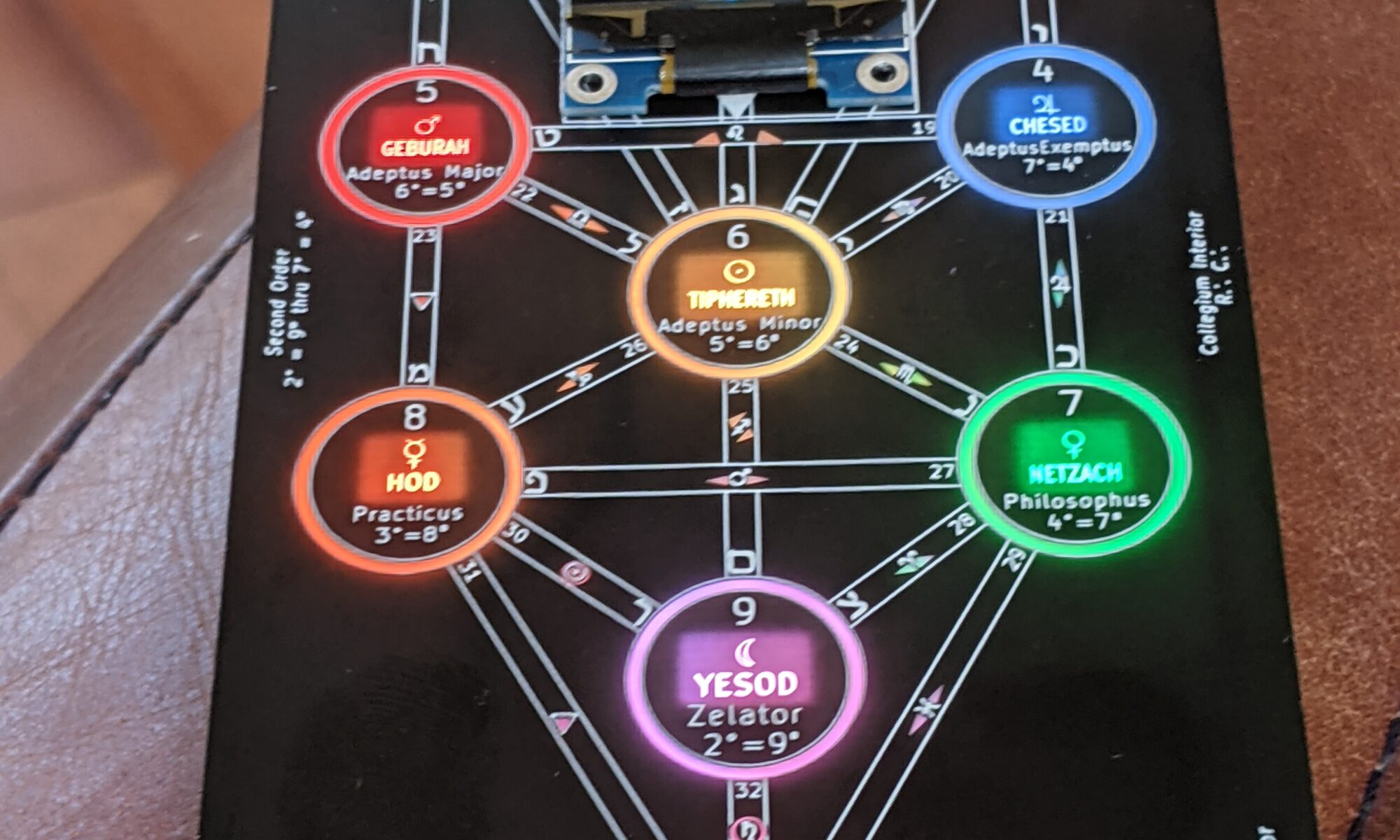
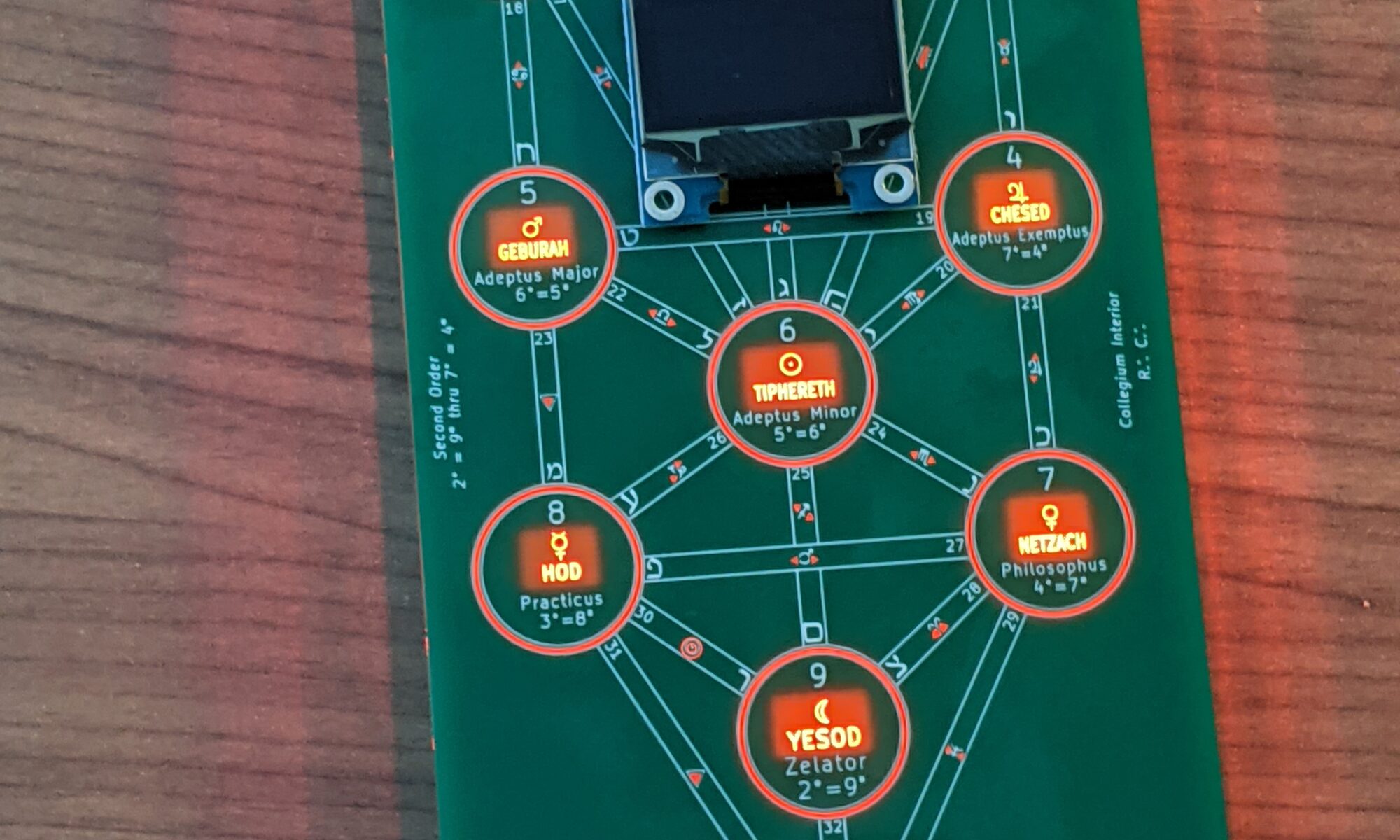
We had started with the idea of a simple door-based badge design with an embedded game/challenge for our first badge. But ambition got the best of us, and honestly, we needed something to set our badge apart from every other badge out there. Something to make it unique. Go big or go home, right? And after a few iterations, and a planning meeting or three, an epiphany came. I realized that our challenge, which involved unlocking different “levels,” seemed to overlap nicely with the tree of life (Kabbalah) concept, and the Kabbalah provides a rich visual canvas on which to project our gameplay progress.
Additionally, for those who study Kaballah, because we based our badge on the Raspberry Pi Pico, the badge provides a platform for writing your own application. Perhaps something to reinforce the correspondences between Kaballah, Tarot, astrology, I Ching, colors, hebrew letters, gematria, etc. If Kabbalah is your thing, then you’re probably well aware of what I’m talking about.
If you’re not aware, the origin of Kabbalah is beyond the scope of this description. Very briefly, I’ll summarize what it is and isn’t. It isn’t devil worship. Kabbalah, as Jewish mysticism, dates back at least to the late 1100s in Europe. Modern Kabbalah can be seen as a framework for interpretation of physical and spiritual reality. The version we chose to implement is the version used by Aleister Crowley.
The badge consists of two PCBs — the surface PCB has solder mask cutouts to allow the light to shine through from below, and also houses an OLED, six tactile switches (buttons) and a Shitty Add-On (SAO) connector. The bottom PCB houses the Pico (surface-mounted, thanks to its castellated edges! sorry, we’re not worthy of surface-mounting picos, holy crap!), 32 RGB LEDs and a wireless transceiver. The two PCBs are connected by a pair of 1×8 connectors, and a pair of M3 screws for stability. A lanyard will be included. The final badge will use black solder mask instead of green. Because black is the most magickal color.
We’re going to go ahead and offer preorders through Shopify. We expect to have them in hand prior to Defcon, and we will bring some out for those who want to buy them in person, but if you’re NOT going this year, and you’d like it shipped to you, that means we have less to carry to Vegas with us. :). The link should be in the sidebar.
Update 2021-07-10: What you’ll get: You’ll get a fully assembled badge, a battery holder and two AA batteries, and a custom lanyard.
Expectations: I 100% expect the LEDs to be fully functional, they were successful on prototype #2. This is our first badge, and by far the most complicated thing I’ve ever designed for fabrication. I got the 1×8 headers lined up right, yay! The M3 screwholes are sufficient, when populated with a long enough M3 screw, to keep the side-to-side wobble in check. I’m 95% certain the OLED will work. I fubar’d the prototype by orientating the 1×8 headers backwards on the top board. That screwed up my testing capabilities for the OLED. Expectations for the wireless transceiver (NRF24L01+) are a bit lower. We haven’t even nailed down exactly what we expect it to do, and I think I ran a trace too close to a pad, causing a short. So unable to test that either. They work fine on the breadboard, though, so we’ll continuing developing and testing with the aim of it working. Be honest, though. You’re buying this for the blinkyshit, or your a dirty occultist who’s up to no good, in which case you can use your magickal wizard powers to make it work (or just cut traces and fix it if it’s wrong in prod).
Mounting the Pico as SMD using the castellated edges was something I wanted to do from the getgo. It means more surface space for artwork, and less annoying thru-holes. It does add a layer of complication, though. Or a challenge. Hell, let’s call it a probletunity. It’s forcing me to up my hot air game. It’s harder, I will say. It’s hard to know when the paste is melted enough underneath to avoid shorts, and I really found myself looking closely in the thru-holes to see the paste bubble up and turn from gray to silver. I also worried that I’d fry nearby electronics, but I think my technique is sound, and I’m using low temp paste. I may try baking one in the T-962 at some point, once I figure out how to add new bake profiles to it. Nope. Too hard. Back to thru-hole for the Pico.
I can’t guarantee we’ll have them in hand for Defcon, as I’m relying on outside entities. But they’ve been great so far, knock on wood. So that’s our goal.
I gave a silly little “Intro to KiCad” presentation at our meetup last night, before the weather came and insisted we not congregate outdoors.
I shit you not, it happened almost too fast to document. “Oh look, the sky is threatening. Oh wow, the wind is picking up. Better get the electronics inside. Oh, there go the beer cans and a dessert plate. Holy shit.
Then everyone scattered home, and it really came down. We actually had hail. It was the first time hearing hail in our house. People were concerned. The cat was concerned.
Anyhow, I wanted to relay a problem/solution I ran across yesterday, because I hadn’t come across this particular solution to the problem in my Googling, and maybe this will help someone.
PROBLEM: When trying to do a 3D view, you get the dreaded “Cannot determine board outline” message and it will not properly render your board shape.
VARIANT 1: KiCad provides coordinates to look at. In most cases, this is because your board edges aren’t properly connected and locked together. Go around the perimeter, zoom in very close, and click both lines, observing where the square marking the end of the segment appears. If they are in the exact same point, they are locked together, move on to the next one. If you need to move one, move it until a circle with a square inside appears, that’s the locked/connected indicator while moving the line.
VARIANT 2: KiCad provides no further information, just the subject error message. This one took me a few minutes. I walked the perimeter and everything was fine/locked. I turned off all other layers’ visibility except for Edge Cuts and could see no stray segments. I was confused. So I went old school. Knowing that all of these files are just text files with information, I grepped the .kicad_pcb file for “Edge” and was treated with the following:
My first clue was that my board shape was a rectangle and there were five segments described. The second clue is that fifth segment was too short. Ridiculously short. Invisibly short. So I zoomed in at those coordinates, and sure enough, there was a stray dot of edge cut sitting there that couldn’t be seen without the zoom. I removed it, then everything was fine.
Documenting here in case it helps others. But if you don’t move your board outlines much, and don’t accidentally draw on the edge cut layer and forget it, this probably won’t happen to you.
It occurs to me that this happens frequently with other layers, I often end up with an extra dot of something that I discover later when zoomed in. It might be useful to have a routine or view that just highlights every sub-millimeter unnecessary portion of wire, mask, edge or silkscreen that was probably left there by accident. 🙂
So this thing we’re working on, you know. This is the second or third iteration of an idea, and it finally got enough momentum to, you know, be something. Or become something.
Originally, we were going to do it on maybe an ESP8266. Then maybe an ESP32. Then the Pico came out, and we’re like, fuck it, let’s ride the wave of momentum of this new awesome microcontroller and see what we can do with it.
Well, it’s amazing, and awesome, and wonderful, BUT it lacks wireless communication.
And we started looking into what it would take.
And found a couple of articles that piggyback an ESP32 to handle the comms.
Meh. Nah. Number 1, if we wanted an ESP32, we’d just use an ESP32. Number 2, we don’t need, or even want, full wifi. We just want communication between units. For this thing of ours.
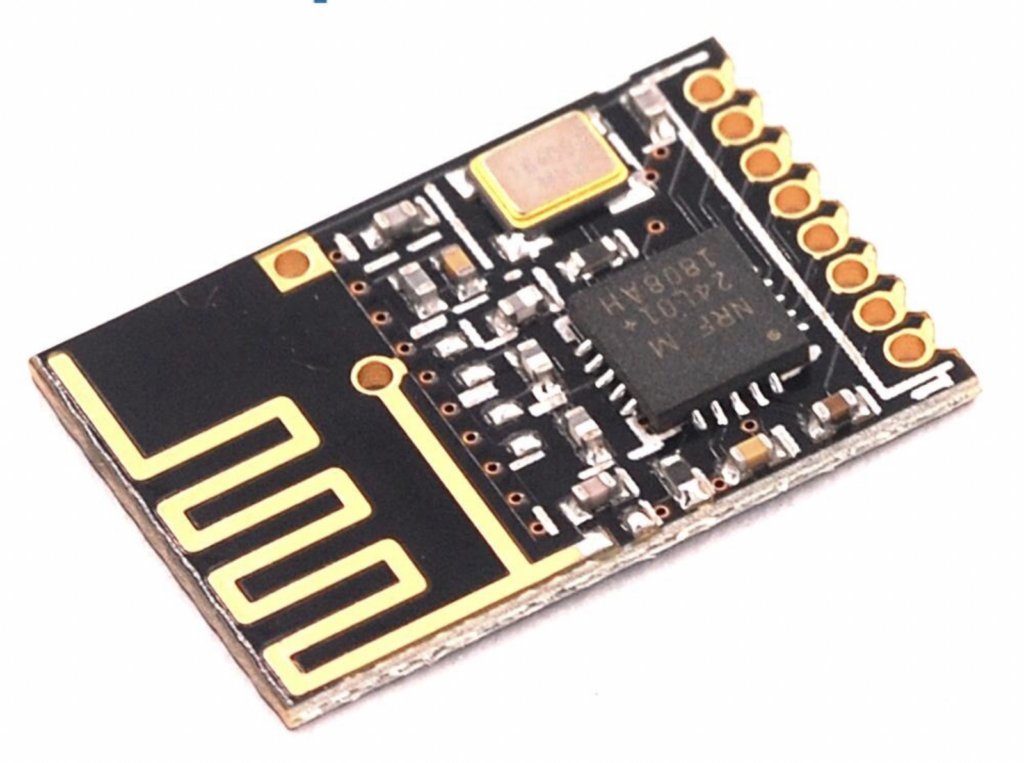
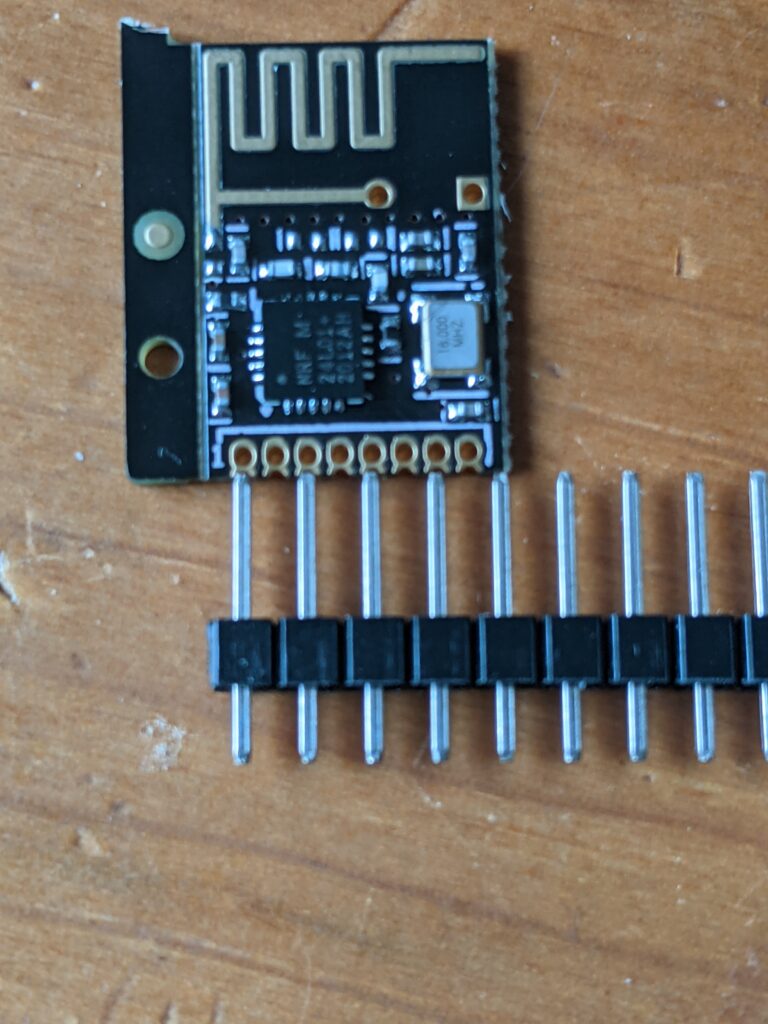
Then I saw that I can get this model of the NRF24L01+ for just a buck a piece.
Like the Pico, it has those glorious edges that can either be thru-hole (albeit half pitch) or surface-mount. I love that, you all know I love that. I love that you can mount it on a board and the other side of the board can be virtually unmolested.
So I picked up a few for testing.
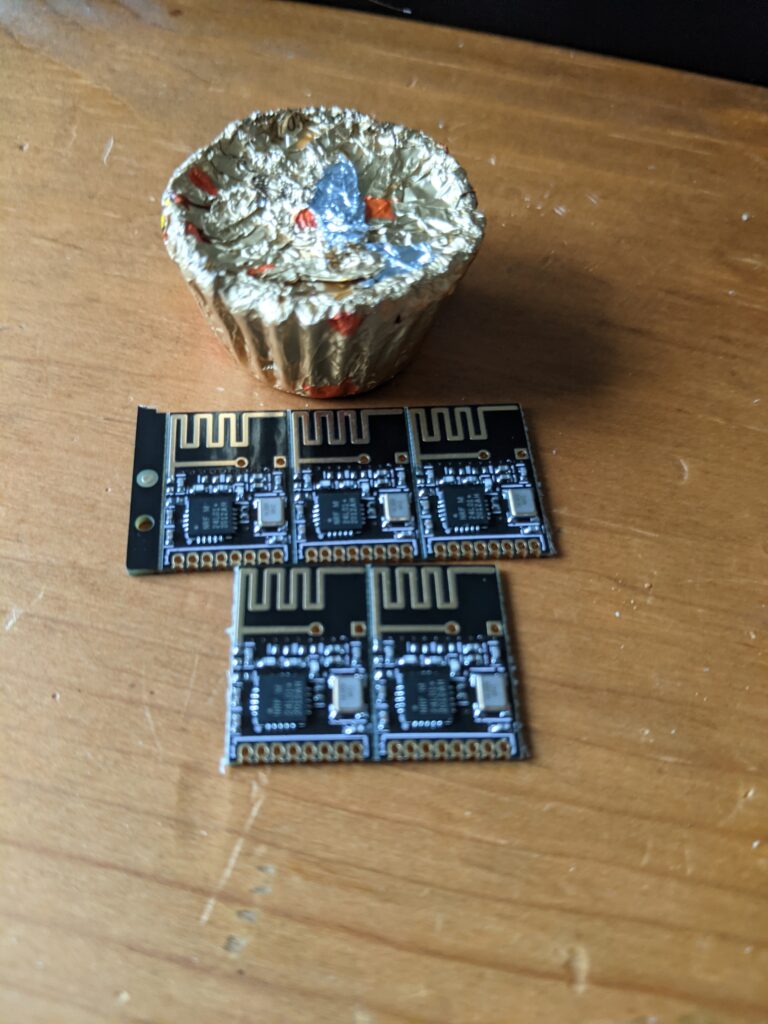
And dang, they’re small.
And this half-pitch bullshit presents a problem for traditional breadboarding.
Fortunately, I have some SMD breakout boards that fit this perfectly. Let’s put a couple together for testing.
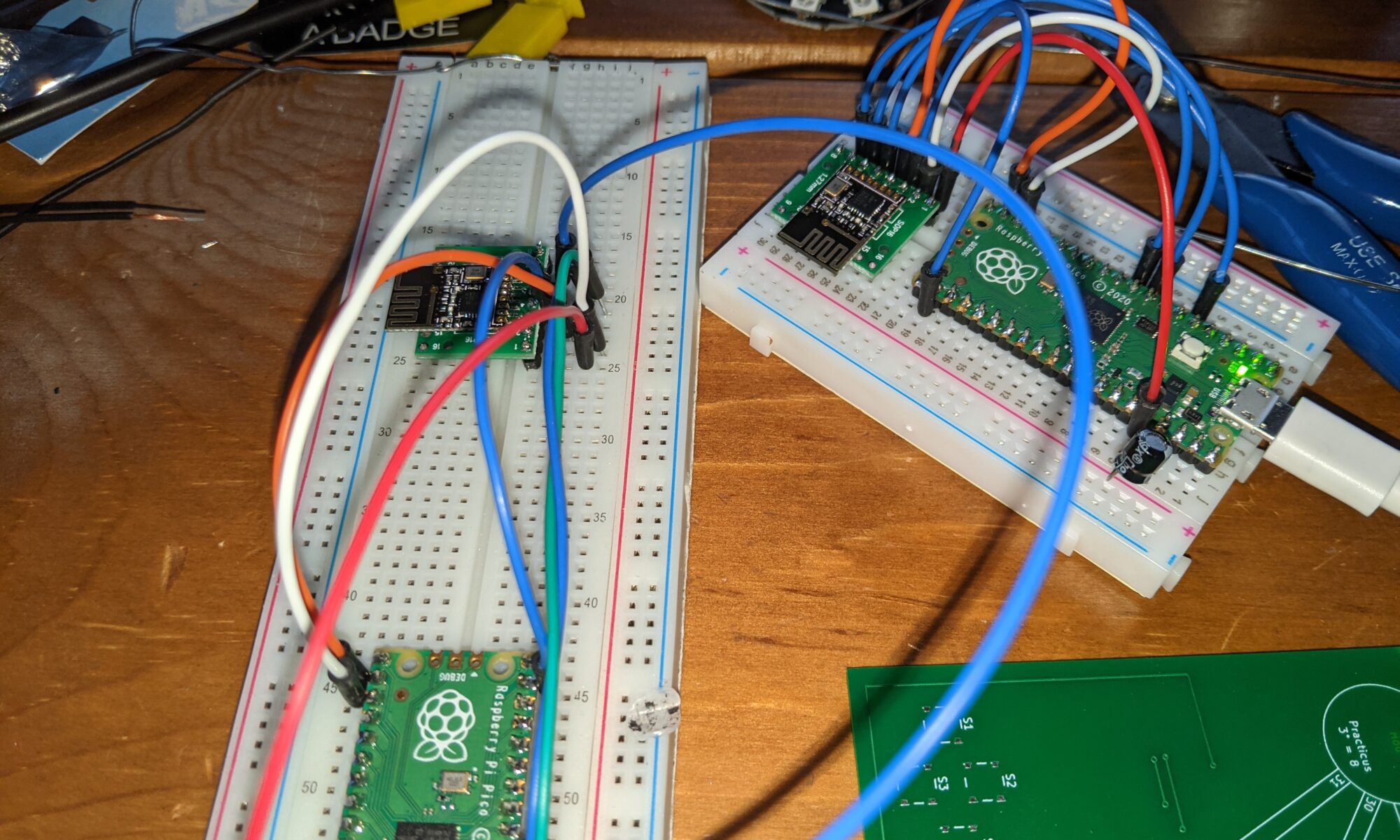
OK, now that I can breadboard this, let’s find some software for it.
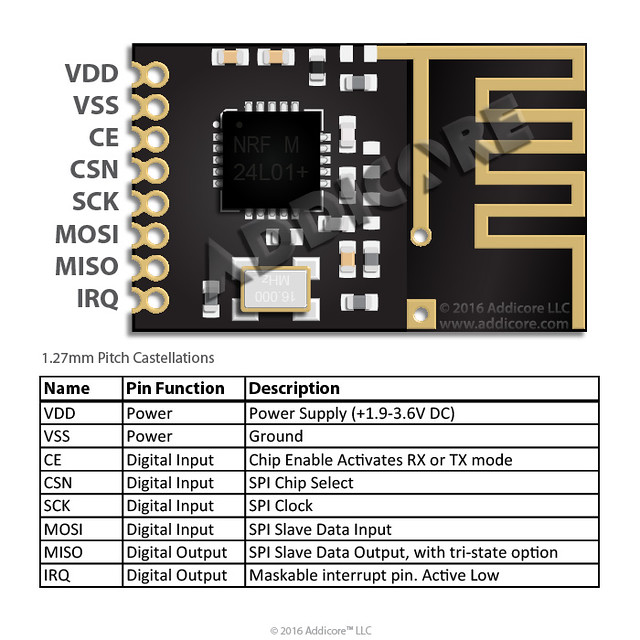
and connect the appropriate pins on your Pico to the correct pins on the NRF24L01+:
So I did all this, and fixed the connections so that I wasn’t getting hardware failures. I did it twice, because the example code has a master function and a slave function. Yes, I know, these are now outdated terms. Maybe someone should tell them to update it.
Anyhow, nrf24l01test.master() broadcasts a packet with the milliseconds, and wait 250ms for a response. nrf24l01test.slave() will listen for those packets, and if one is received, send a response. I ran it, excitedly — one pico/nrf24l01 assembly running nrf24l01test.slave() and another running nrf24l01test.master()… and…
Nothing. Response timeout. Consistently. So I googled a bit, and found that with some devices, a capacitor is needed “to smooth the current.” Some docs say 10uf, others say 100uf. I found that 10uf cut the failures to about half, and 100uf eliminated the failures. With a 100uf capacitor between VDD and GND on the transceiver, responses come back steadily, even if I take the sender into another room, 30 feet away, even to a different floor of the house, with walls in between. I’m impressed.
Interesting info: I had so much trouble finding a KiCad symbol and footprint for this device that I started to build my own. But then I found one by accident in the mysensors repo. Important note: Pay attention to the symbol on this one. The symbol as provided in mysensors has VCC on pin 2 and GND on pin 1, but the units I received have VCC on pin 1 and GND on pin 2. I suspect that’s the reason for one review of the unit I ordered stating that the pinout was nonstandard. I don’t know what’s official and standard, but the pinout on the units I received match the photo above, so maybe mysensors is wrong, or maybe there is no standard. Just be aware so that you don’t smoke your transceivers.
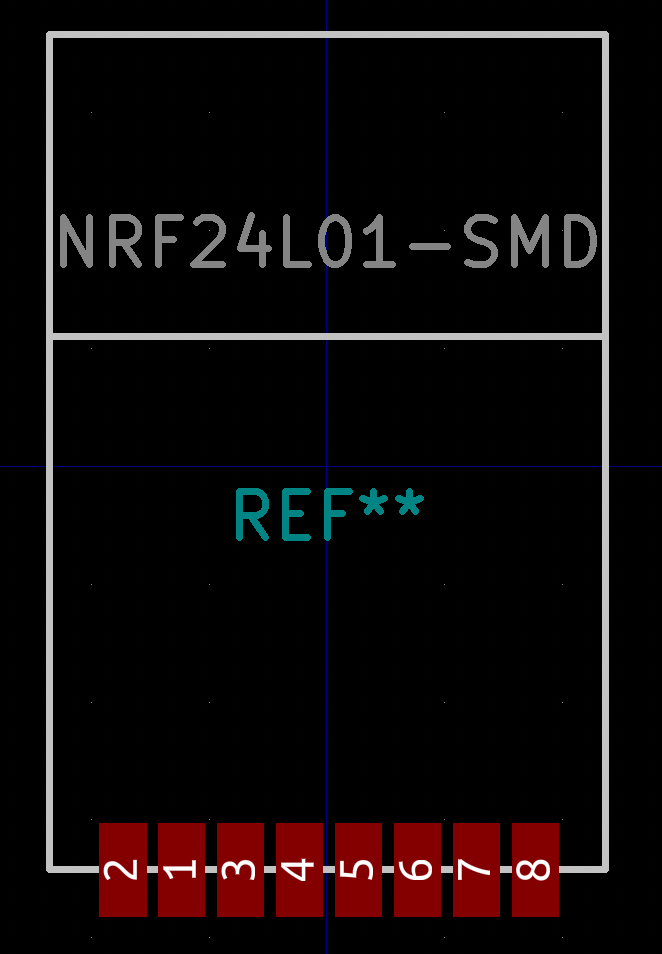
Update: LOL. I take it back about the pin 1 vs 2 confusion. Look what they did in the footprint!
OK, Actually it will be Hybrid. We want to be inclusive to those who can’t make it out. We’ll be talking about badge planning, and I’ll give a demo of PCB design and how to build a badge in KiCad, from a blank slate to fabrication. You can put your filthy grubby hands on the early prototypes of the badge we hope to release at “summer camp” this year.
Weather looks good for a backyard meetup. I’ll see if I can bring a large-ish screen out to the table so everybody doesn’t have to crowd around my laptop. And I’ll stream the screen in the Discord so everyone can see it.